
Publication List
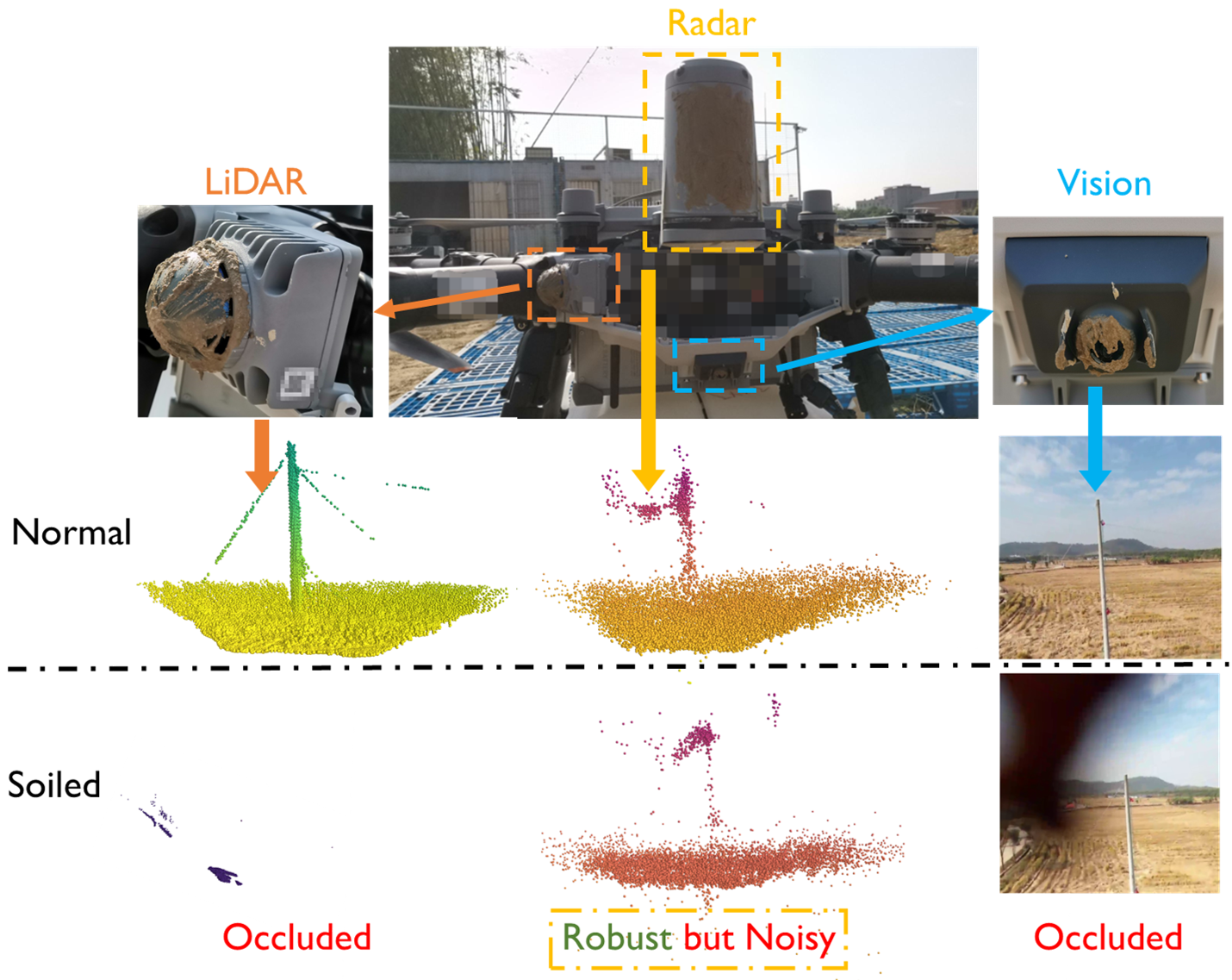
Sem-RaDiff: Diffusion-Based 3D Radar Semantic Perception in Cluttered Agricultural Environments
Ruibin Zhang, Jialiang Hou, and Fei Gao
IEEE Transactions on Automation Science and Engineering (T-ASE), 2026.
[paper]
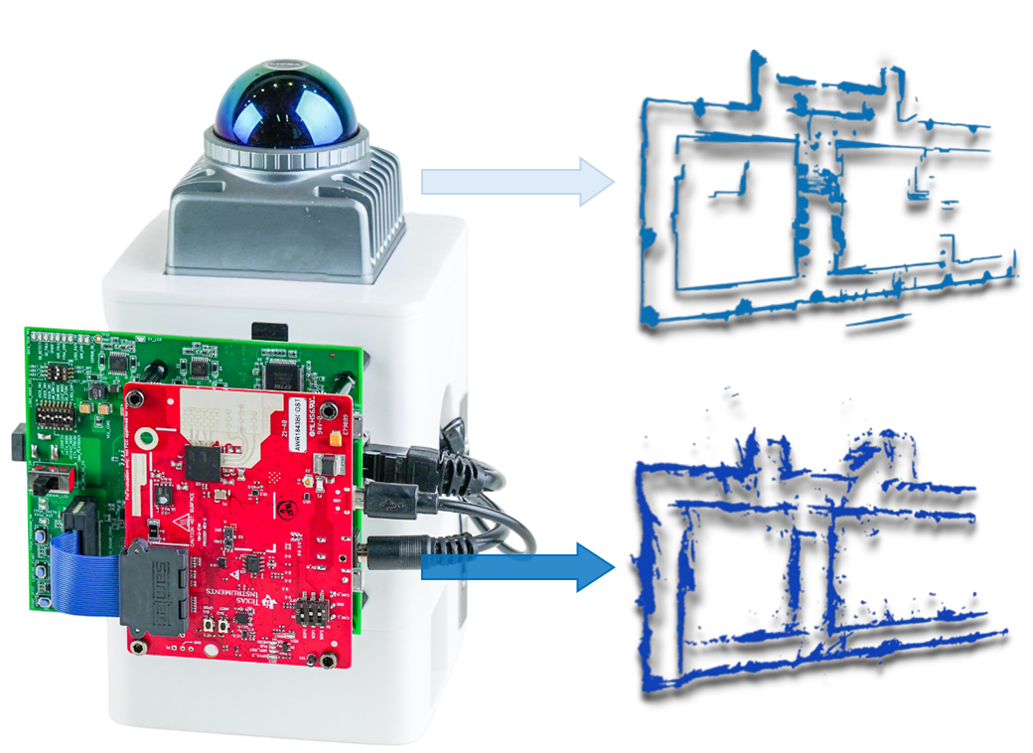
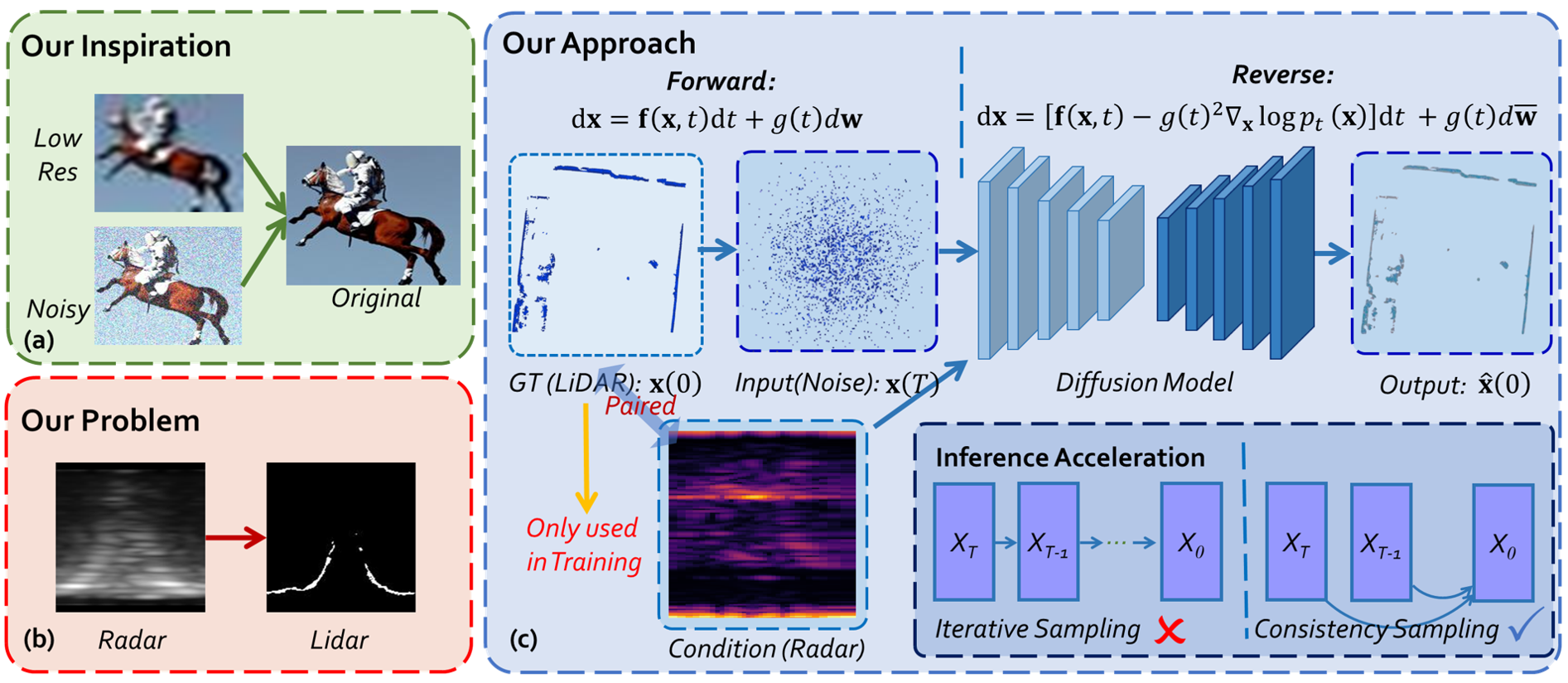
Towards Dense and Accurate Radar Perception Via Efficient Cross-Modal Diffusion Model
Ruibin Zhang#, Donglai Xue#, Yuhan Wang, Ruixu Geng, Fei Gao*
IEEE Robotics and Automation Letters (RA-L), 2024.
[paper] [code] [video]
Model-based planning and control for terrestrial-aerial bimodal vehicles with passive wheels
Ruibin Zhang, Junxiao Lin, Yuze Wu, Yuman Gao, Chi Wang, Chao Xu, Yanjun Cao, Fei Gao* IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
[paper] [video] [Media Report]

Autonomous and adaptive navigation for terrestrial-aerial bimodal vehicles
Ruibin Zhang, Yuze Wu, Lixian Zhang, Chao Xu, Fei Gao* IEEE Robotics and Automation Letters (RA-L), 2022.
[paper] [code] [video]
Fast-Tracker: A Robust Aerial System for Tracking Agile Target in Cluttered Environments
Zhichao Han#, Ruibin Zhang#, Neng Pan#, Chao Xu, Fei Gao* IEEE International Conference on Robotics and Automation (ICRA), 2021.
[paper] [code] [video] [Media Report]
![]()
![]()
Autonomous Exploration With Terrestrial-Aerial Bimodal Vehicles
Yuman Gao#, Ruibin Zhang#, Tiancheng Lai, Yanjun Cao, Chao Xu, Fei Gao*
IEEE Robotics and Automation Letters (RA-L), 2025.
[paper] [video]
Fast‐Tracker 2.0: Improving autonomy of aerial tracking with active vision and human location regression
Neng Pan, Ruibin Zhang, Tiankai Yang, Can Cui, Chao Xu, Fei Gao* IET Cyber‐Systems and Robotics, 2021.
[paper] [video]
Skater: A novel bi-modal bi-copter robot for adaptive locomotion in air and diverse terrain
Junxiao Lin, Ruibin Zhang, Neng Pan, Chao Xu, Fei Gao* IEEE Robotics and Automation Letters (RA-L), 2024.
[paper] [video]
Skywalker: A compact and agile air-ground omnidirectional vehicle
Neng Pan, Jinqi Jiang, Ruibin Zhang, Can Cui, Chao Xu, Fei Gao* IEEE Robotics and Automation Letters (RA-L), 2023.
[paper] [video]
TrofyBot: A Transformable Rolling and Flying Robot with High Energy Efficiency
Mingwei Lai, Yuqian Ye, Hanyu Wu, Chice Xuan, Ruibin Zhang, Qiuyu Ren, Fei Gao, Chao Xu, Yanjun Cao* IEEE International Conference on Robotics and Automation (ICRA), Best Paper Finalist, 2025.
[paper] [video]
Roller-Quadrotor: A Novel Hybrid Terrestrial/Aerial Quadrotor with Unicycle-Driven and Rotor-Assisted Turning
Zhi Zheng, Jin Wang, Yuze Wu, Qifeng Cai, Huan Yu, Ruibin Zhang, Jie Tu, Jun Meng, Guodong Lu, Fei Gao* IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025.
[paper] [video]